Nombre Parcourir:0 auteur:Éditeur du site publier Temps: 2022-11-24 origine:Propulsé

Balayage 3D est le processus d'analyse d'un objet ou d'un environnement réel pour recueillir des données sur sa forme et son apparence probable (comme la couleur). Les données collectées peuvent être utilisées pour créer des modèles 3D numériques.Les scanners 3D peuvent être basés sur un certain nombre de technologies différentes, chacune avec ses propres limitations, Avantages et coûts , les scanners 3D lidar et temps de vol peuvent être utilisés pour construire des modèles 3D numériques sans test destructeur.Les données 3D collectées peuvent être utilisées dans diverses applications. Ces appareils sont largement utilisés par l'industrie du divertissement pour créer des films et des jeux vidéo, y compris la réalité virtuelle. Les autres applications courantes de cette technologie incluent la réalité augmentée, la capture de mouvement, la reconnaissance des gestes, la cartographie robotique, Conception industrielle, orthèses et prothèses, ingénierie inverse et prototypage, contrôle / inspection de la qualité et numérisation des artefacts culturels.

Le but d'un scanner 3D est généralement de créer des modèles 3D. Appelé la reconstruction). Si les informations de couleur sont collectées à chaque point, il est également possible de déterminer la couleur ou la texture de la surface de l'objet.Les scanners 3D partagent plusieurs caractéristiques avec des caméras. Comme la plupart des caméras, ils ont un champ de vision en forme de cône, et comme les appareils photo, ils ne peuvent collecter des informations que sur des surfaces dégagées.Une caméra collecte des informations de couleur pour les surfaces dans son champ de vision, tandis qu'un Le scanner 3D recueille des informations à distance pour les surfaces dans son champ de visualisation.Les "Picture " produits par le scanner 3D décrit la distance de chaque point de l'image de la surface. .Dans certains cas, un seul scan ne produira pas un modèle complet du sujet. Faire des analyses multiples dans différentes directions est souvent utile pour obtenir des informations sur divers aspects d'un objet. Ces analyses doivent être introduites dans un système de référence commun, un processus souvent Appelé l'alignement ou l'enregistrement, puis fusionné pour créer un modèle 3D complet. Le processus entier d'une carte à une seule plage à un modèle entier est souvent appelé pipeline de balayage 3D.
Il existe différentes techniques qui peuvent être utilisées pour obtenir la forme des objets 3D numériquement. Ces techniques sont applicables à la plupart ou à tous en deux types: contact et sans contact. Les solutions sans contact peuvent être divisées en deux grandes catégories, actives et passives. Chacune de ces catégories a plusieurs techniques.
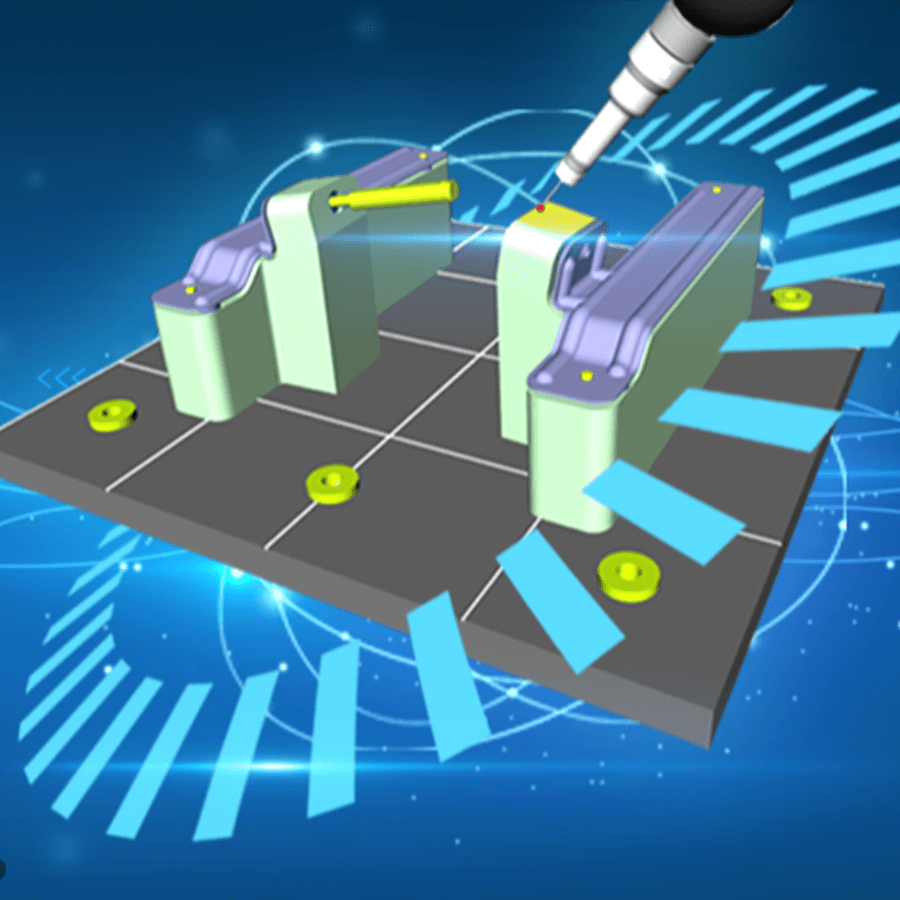
Les scanners 3D de contact fonctionnent en sondant physiquement (touchant) la pièce et en enregistrant la position du capteur lorsque la sonde se déplace autour de la pièce.
Il existe deux principaux types de scanners 3D de contact:
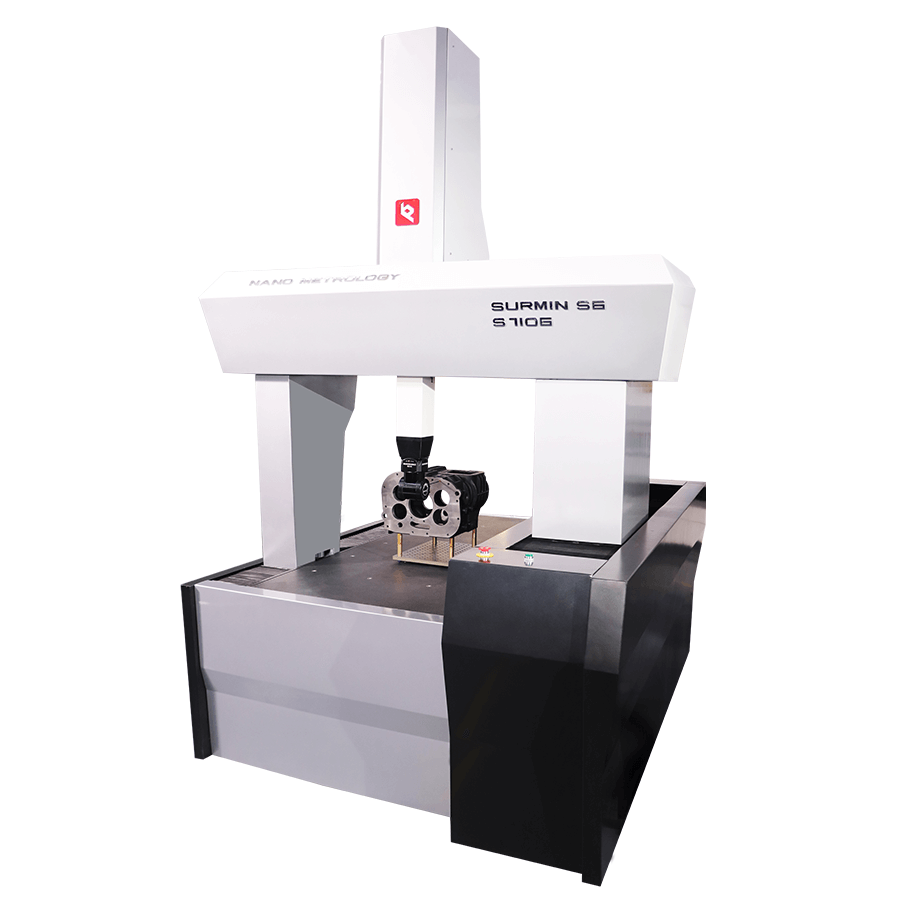
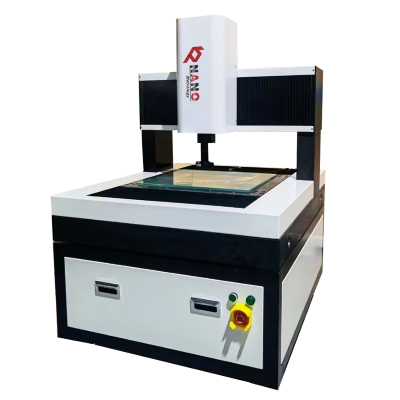
Les machines de mesure des coordonnées (CMMS) ont traditionnellement 3 axes de mouvement vertical avec une sonde tactile montée sur l'axe z. Lorsque la sonde se déplace autour de la pièce, les capteurs de chaque axe enregistrent la position pour générer des coordonnées XYZ. Les CMM modernes sont des systèmes à 5 axes, avec les deux autres axes fournis par une tête de capteur rotatif.CMMS est la forme la plus précise de la mesure 3D, jusqu'à la précision du micron. Le plus grand avantage d'un CMM après précision est qu'il peut fonctionner en autonome (CNC) ou en tant que système de sondage manuel. L'inconvénient du CMMS est leur coût initial et les connaissances techniques nécessaires pour les faire fonctionner.
Un bras articulé, généralement avec plusieurs segments, avec des capteurs de poteau sur chaque articulation. Selon le CMM, alors que les bras articulés se déplacent autour de la pièce, les capteurs enregistrent leurs positions et que les mathématiques complexes sont utilisées pour calculer les positions des extrémités des bras , ainsi que la rotation du poignet et les angles de charnière pour chaque joint. Bien que généralement pas aussi précis qu'un CMM, les bras articulés atteignent toujours une précision élevée et sont moins chers et plus faciles à utiliser. Ils n'ont généralement pas d'option CNC.Le CMMS moderne et les bras articulés peuvent également être équipés de scanners laser sans contact au lieu de sondes de contact.
Activités sans contact
Les scanners actifs émettent une sorte de rayonnement ou de lumière et détecter le rayonnement qu'il reflète ou traverse l'objet pour détecter l'objet ou l'environnement. Les types d'émissions possibles incluent la lumière, l'échographie ou les rayons X.
Durée du vol
Un scanner laser 3D à temps de vol est un scanner actif qui utilise la lumière laser pour détecter les objets. Au cœur de ce scanner est un télémètre laser à temps de vol. Les chercheurs de plage laser déterminent la distance à une surface en comptant le temps aller-retour d'une impulsion de lumière. Un laser est utilisé pour émettre une impulsion de lumière, et la durée avant la lumière réfléchie est observée par un détecteur est mesurée. Étant donné que la vitesse de la lumière est connue, le temps aller-retour détermine la distance parcourue par la lumière, ce qui représente le double de la distance entre le scanner et la surface. Si le temps aller-retour, alors la distance est égale à la précision d'un Le scanner laser 3D Time of Fight dépend de la précision du temps: 3,3 Picosecondes (environ) est le temps qu'il faut de la lumière pour voyager de 1 mm.Un télémètre laser ne détecte que la distance à un point dans sa direction de visualisation. Le télémètre peut être modifié en tournant le télémètre lui-même ou en utilisant un système de miroir rotatif. Cette dernière méthode est généralement utilisée car le miroir est plus léger et peut donc être tourné plus rapidement et avec précision. Distances à 10 000 à 100 000 points par seconde.Des périphériques de temps de vol sont également disponibles en configurations 2D. C'est ce qu'on appelle une caméra de temps de vol.
Triangulation
Les scanners laser 3D basés sur la triangulation sont également des scanners actifs qui utilisent la lumière laser pour sonder l'environnement. Avec des scanners laser 3D à temps de vol, un laser de triangulation brille la lumière laser sur un objet et utilise une caméra pour trouver l'emplacement du spot laser .Densibilisation sur la mesure dans laquelle le laser atteint la surface, le point laser apparaît à différentes positions dans le champ de vision de la caméra. Cette technique est appelée triangulation parce que le point laser, la caméra et l'émetteur laser forment un triangle. La longueur d'un côté du côté du côté du côté Triangle, la distance entre la caméra et l'émetteur laser est connue. L'angle de l'angle d'émission laser est également connu. L'angle de l'angle de la caméra peut être déterminé en regardant la position du point laser dans le champ de vision de la caméra. Ces trois informations déterminent complètement la forme et la taille du triangle et donnent l'emplacement des coins de la tache laser du triangle. Dans la plupart des cas, les rayures laser plutôt que les taches laser individuelles sont balayées SS l'objet pour accélérer le processus d'acquisition.